Wykonałem pomiary oscyloskopowe poboru prądu przez silnik pompy hydroforowej, który posiadam w domu:

Znamionowa moc silnika 1f to 1,1 kW.
Pomiary wykonałem używając przekładnika prądowego 50A/1V SCT013 www.yhdc.com:

Na początek, w celu zweryfikowania wartości pomiaru, zmierzyłem pobór prądu gofrownicy o mocy 1200 W, jako czysto rezystancyjnego obciążenia:

Napięcie wyniosło ok. 100 mV RMS, co odpowiada ok. 5 A RMS. 1200W / 230 V = 5,2 A. Wpięty szeregowo (chiński) wskaźnik prądu pokazał 4,9V. Zakładam więc, że przekładnik wskazuje poprawnie z dokładnością 20 %. Na chwilę obecną nie mam jak wykonać wzorcowania.
Czyli przelicznik : 1 mV -> 50 mA
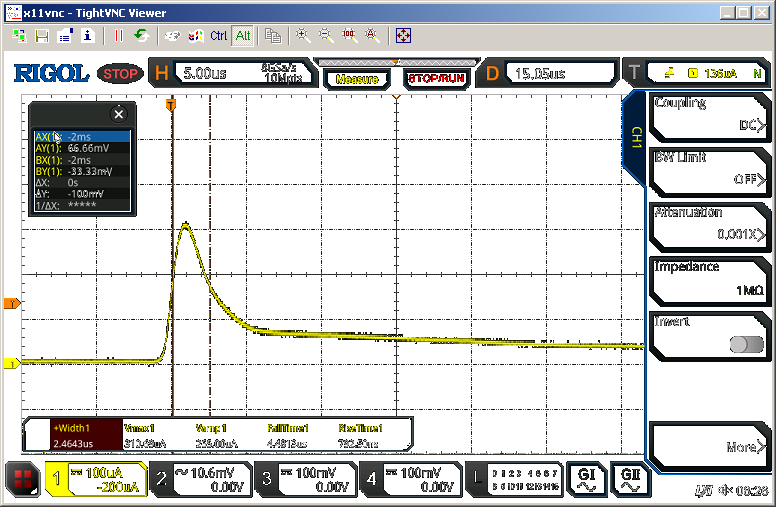
A teraz zasadnicze pomiary:

Rozruch silnika trwa około 300 ms, i Irms = 473 mV RMS / 1.41 * 50 = 16,8 A.
Daje to udar o mocy około 3860 VA.

W czasie zasadniczej pracy pompy pobór prądu wynosi 83 * 0.05 =4.15 A i odpowiada to ok 955 VA mocy przy napięciu 230 V rms.
Nie mierzyłem dokładnie wartości napięcia sieci, ale wskaźnik na testerze pokazywał ok 227 V, czyli bardzo zbliżona wartość do znamionowych 230 V.
Dla jasności, nie mierzyłem tutaj mocy rzeczywistej, a pozorną. Natomiast silnik wykonywał pracę pompując wodę, więc zakładam dosyć dobry współczynnik mocy (bliski 1.0). Nie ma to w sumie znaczenia, bo moc pozorna jest bardziej adekwatną wartością do doboru awaryjnego źródła zasilania.
Chcąc wykorzystać UPS na pewno jego moc pozorna musi być powyżej 1000 VA. Przydałoby się sprawdzić wykorzystanie układu soft-start. Bez niego UPS musiałby wytrzymywać udary na poziomie 4000 VA.







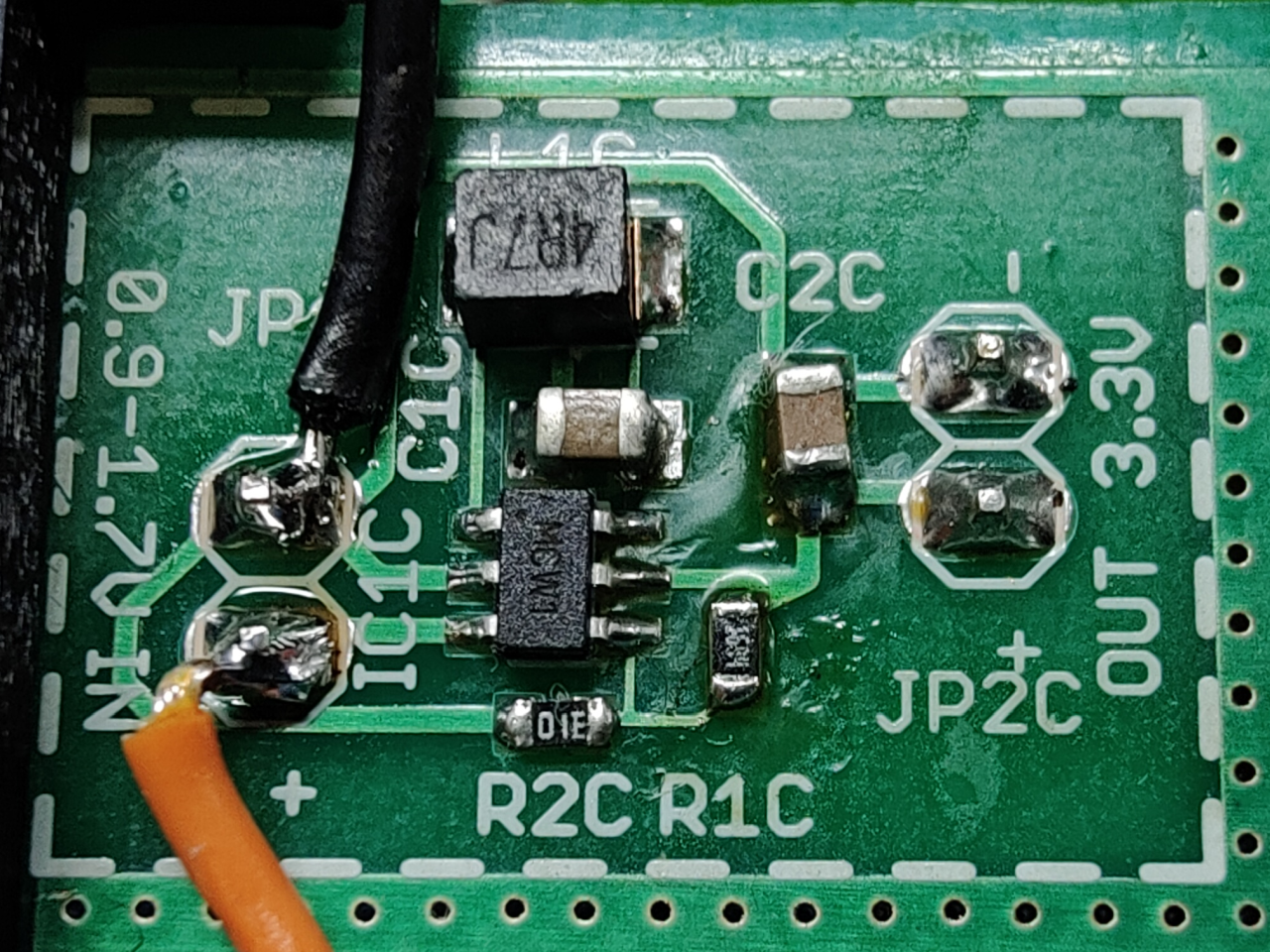 Badany układ z przetwornicą
Badany układ z przetwornicą