Procesor STM32F103C8T6 z rdzeniem ARM®Cortex®-M3 mogącym pracować z taktowaniem do 72MHz. 20KB SRAM i 64KB FLASH są zaletami, ale brak FPU w tej serii poważnie zmniejsza wydajność obliczeniową dla FFT, które zwykle wykorzystują typ danych float.
Uwaga 1: W tych eksperymentach nie jest wykorzystywany ADC – sample są generowane przez zdefiniowaną funkcję.
Uwaga 2: Wykorzystałem bibliotekę https://github.com/leeshineSZ/fft_for_stm32 – w razie jakby zniknęła z sieci, załączam:
fft_for_stm32-master
Uwaga 3: Do pomiarów wydajności wykorzystuję timer TIM1 w roli zwykłego timera/licznika. Okres ustawiony na max, tj. 65535. Prescaler na 1000. Ponieważ zegar trafia z linii APB2, to w moim przypadku daje to 72MHz na wejściu, po prescalerze 72KHz. Daje to (1/72KHz) 13,89us na pojedynczą inkrementację licznika. Wystarczy zerować rejestr licznika TIM1->CNT przed pomiarem, i odczytać rejestr po zakończeniu pomiaru, a potem przemnożyć przez 13,89us, żeby otrzymać czas potrzebny na wykonanie obliczeń.
Najpierw sprawdzałem, ile zajmuje mnożenie liczb float, a dokładniej zmiennej przez stałą. Jest to ok 3,43us, wliczając obieg pętli for.
Obliczenia FFT dla tablicy 128 próbek zajmują 6,5ms. Do tego trzeba doliczyć wyliczanie modułów liczb zespolonych – kolejne 0,93ms. Łącznie 7,43ms.
Daje to ok. 134Hz częstotliwości aktualizacji widma. Jest to tylko 128 próbek, czyli realnie 64 wartości w widmie – może wystarczyć do spektrometru na led-ach, gdzie mamy kilkanaście pasków.
Dla 1024 próbek FFT 61ms + moduł 7,4ms = 68,5ms, co daje częstotliwość odświeżania 14,6Hz – dosyć mało jak na wizualizację „real time”.
Wniosek 1: Częstotliwość próbkowania jest niezależna od ilości próbek, jakie bierzemy do analizy.
Wniosek 2: Więcej próbek – znacznie więcej czasu na obliczenia. Warto tą kwestię najpierw przemyśleć, bo zmiana nie ogranicza nam pasma, jedynie rozdzielczość.
Wniosek 3: Nie zastosowałem tu okien, co powoduje, że np. w widmie fali prostokątnej ciężko się jest jej doszukać – kolejne prążki szybko gasną, zwłasza jak nie „trafimy” z częstotliwością.
Wniosek 4: Fajnie by było wyeliminować floaty i skorzystać z np obliczeń stałoprzecinkowych.
Wniosek 5: Żeby wartości modułów odpowiadały rzeczywistości, należy ich amplitudy podzielić przez [0,5 x ilość próbek].
Wizualizacja obliczeń dla fali prostokątnej, 128 próbek i dokładnie „trafionej” (jeden cały okres):

Widać niską wartość składowej stałej i szybko malejące prążki nieparzyste – parzyste są równe składowej stałej. Nie wiem skąd ta składowa stała – jest dokładnie 64 próbek o wartości -30 i 64 próbki o wartości 30. Takiego rezultatu spodziewałbym się, gdybym miał o jedną próbkę dodatnią na plusie. Chyba że chodzi o aliasing – w końcu nie ograniczałem pasma prostokątowi.
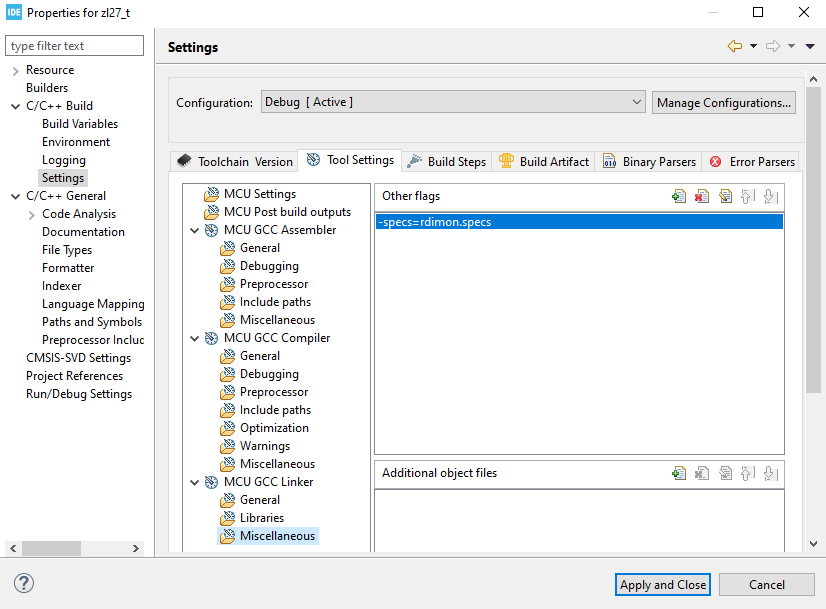
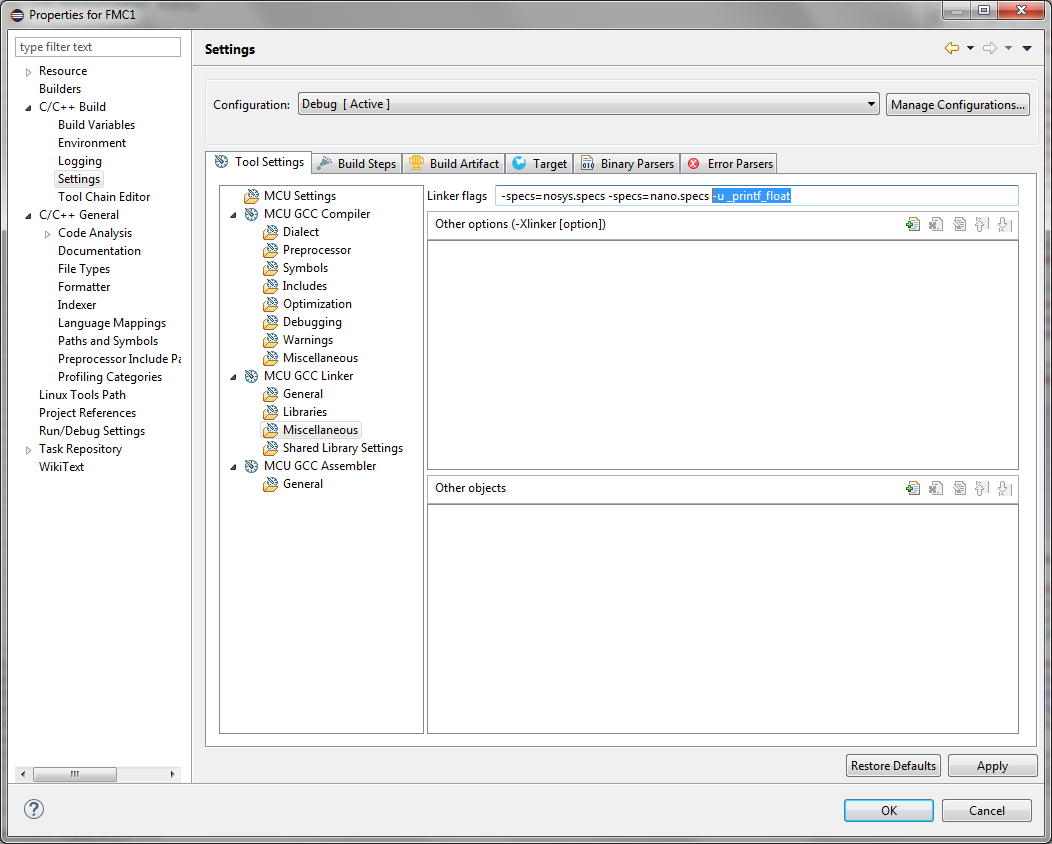
Kod pisany w STM32CubeIDE.