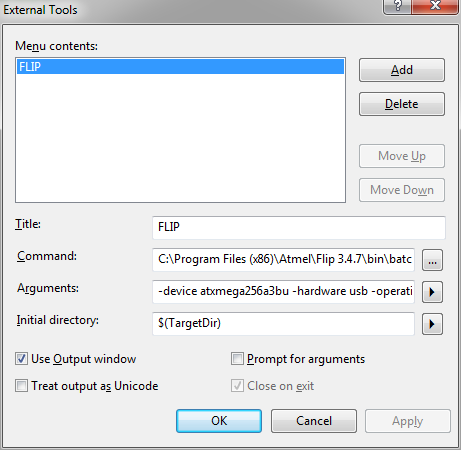
-device atxmega256a3bu -hardware usb -operation erase f memory flash blankcheck loadbuffer "$(TargetPath)" program verify start reset 0
Initial directory:
$(TargetDir)
Zaznaczamy opcję „Use Output window”
Klikamy OK.
Najlepiej dodać sobie tak utworzony skrót do paska narzędzi. Menu View -> Toolbars -> Customize…
Przechodzimy na zakładkę Commands, wybieramy pole Toolbar, z listy rozwijanej preferowany przez nas pasek narzędzi.
Klikamy przycisk „Add Command…” i szukamy w kategorii Tools pozycji „External Command 1”
Trzeba pamiętać, że przed załadowaniem programu musimy ręcznie uruchomić bootloader poprzez zwarcie odpowiedniego pinu do masy i reset mikrokontrolera.
Niestety nie ma możliwości, aby Atmel Studio sam przekazywał w parametrach wywołania programu Flip typ mikroprocesora.
W końcu udało mi się zmusić AVR’ki do odczytu dotykowych przycisków. Biblioteka Atmel Qtouch kusiła, ale za nic nie byłem wstanie jej rozgryźć, a o rozmiarze nie wspomnę. Poczytałem trochę teorii, znalazłem jakieś przykłady i udało się. Pierwszym efektem jest ten moduł. Jak działa w praktyce:
Jak działa w teorii:
Płytki czujników dotyku działają jak kondensatory, ładowane przez rezystor. Mikroprocesor ładuje ten układ RC, mierząc czas. Ponieważ R jest stałe, czas ładowania jest zależny od pojemności. Pojemność zmienia się gdy przykładamy palec – staje się on dielektrykiem. Aby układ działał, należy zadbać o kilka elementów:
-Pojemność takiego „kondensatora” jest bardzo mała. Aby wydłużyć czas ładowania, stosuje się rezystory o dużej wartości (ja użyłem z braku innych 10M, lepsze byłyby około 2-5M om).
-Jeden sensor wymaga jednego pinu do odczytu, i jednego do ładowania, z tym że ten drugi może obsługiwać jednocześnie wiele czujników.
-Czasy są tu bardzo niewielkie; nie ma po co używać funkcji opóźniających; sam obrót pętli pomiarowej jest wystarczająco długi.
-Zmiany pojemności są także niewielkie, dlatego ważne jest aby ta zmiana po przyłożeniu palca była możliwie duża. Dlatego płytki mają powierzchnię w postaci siatki, aby zmniejszyć ich własną pojemność. Wbrew intuicji, im większe pola sensorów, tym niekoniecznie lepiej.
-W takich układach bardzo ważne jest zastosowanie jak najkrótszych ścieżek, aby zmniejszyć szkodliwe pojemności.
-Ważne jest też wylanie dookoła masy, która będzie ekranować zakłócenia i stanowić drugą elektrodę kondensatora.
-Jak wynika z powyższego opisu, pomiar nie polega na wykryciu pojemności ludzkiego ciała względem ziemi, ani niczego takiego. Palec człowieka jest dielektrykiem w polu elektrycznym kondensatora utworzonego z pola czujnika i pobliskiego pola masy.
Wymagana biblioteka (z odpowiednimi przeróbkami): EtherCard
Podłączenie:
Moduł Ethernet pod złącze ICSP na Arduino (MOSI – SI, MISO – SO, SCK – SCK, GND-GND), pin CS do pinu 8, VCC do 3,3V
DHT11 wyjście pod pin 12
MQ7 wyjście analogowe pod pin A0
Fotorezystor pomiędzy VCC a pin A1, który ściągamy do masy rezystorem 1KΩ
Moduł Ethernet podpięty do routera
Aby odnaleźć IP, pod którym widnieje nasz układ proponuję zalogować się do panelu administracyjnego routera, u mnie była to zakładka/okienko „DHCP Client List”. Odczyt z czujnika tlenku węgla w normalnych warunkach wynosi poniżej 50 (<250mV). Potraktowanie go jakimikolwiek oparami powoduje szybką reakcję i skok napięcia powyżej 1V (przy bliskim rozpyleniu).
//ROBOT jeżdżący
//LCD I2C; 2x silniki, sonarr HC-SR04, tsop4836 RC5
//Piny:
/*
12: Silnik prawy kierunek;
11: Silnik prawy PWM;
4: Silnik lewy kierunek;
5: Silnik lewy PWM;
8: Sonar Echo;
9: Sonar trig;
10: TSOP4836;
SDA/SCL: LCD 16x2;
*/
#include <Wire.h> // Comes with Arduino IDE
#include <FastIO.h>
#include <I2CIO.h>
#include <LCD.h>
#include <LiquidCrystal_I2C.h>
#include <LiquidCrystal_SR.h>
#include <LiquidCrystal_SR2W.h>
#include <LiquidCrystal_SR3W.h>
LiquidCrystal_I2C lcd(0x20, 4, 5, 6, 0, 1, 2, 3, 7, POSITIVE); // Set the LCD I2C address
const int echo = 8;
const int trig = 9;
long duration, cm;
void setup(){
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(8, INPUT);
pinMode(9, OUTPUT);
pinMode(10, INPUT);
analogWrite(6,0);
analogWrite(5,0);
digitalWrite(7,LOW);
digitalWrite(4,LOW);
digitalWrite(9,LOW);
lcd.begin(16,2); // initialize the lcd for 20 chars 4 lines]
lcd.setBacklightPin(7, NEGATIVE);
lcd.setBacklight(0);
// NOTE: Cursor Position: CHAR, LINE) start at 0
lcd.setCursor(0,0); //Start at character 4 on line 0
lcd.print("ROBOT! 4");
}
void loop(){
int wynik;
lcd.setCursor(0,1);
lcd.print("L: ");
lcd.setCursor(3,1);
wynik = pomiar();
if(wynik<3000){
lcd.print(wynik);
if(wynik<30)
{
digitalWrite(7,LOW);
digitalWrite(4,LOW);
analogWrite(6,255);
analogWrite(5,255);
}
if((wynik>30) && (wynik<80))
{
digitalWrite(7,LOW);
digitalWrite(4,LOW);
analogWrite(6,0);
analogWrite(5,0);
}
if(wynik>50)
{
digitalWrite(7,HIGH);
digitalWrite(4,HIGH);
analogWrite(6,0);
analogWrite(5,0);
}
}
delay(10);
}
int pomiar(void)
{
pinMode(trig, OUTPUT);
digitalWrite(trig, LOW);
delayMicroseconds(2);
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echo, INPUT);
duration = pulseIn(echo, HIGH);
return microsecondsToCentimeters(duration);
}
int microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}
Malutki, zasilany z jednej bateryjki CR1220 odbiornik kodu RC5 dekodowany za pomocą AVR ATTiny10. Układ steruje dwiema diodami w trybie włącz/wyłącz. W celu uniknięcia niezamierzonych zmian stanów na wyjściach, odczytywany jest bit Toggle z ramki RC5.
Inspiracja: http://www.youtube.com/watch?v=ghtCYlqUlWQ
Wiedza: http://mikrokontrolery.blogspot.com/2011/03/IR-podczerwien-transmisja-standard-pilot-kurs.html
Wsparcie:http://www.elektroda.pl/rtvforum/viewtopic.php?t=2651455&highlight= Kody źródłowe C Atmel Studio 6.1
Zapraszam do zapoznania się i ocenienia mojego artykułu na Mikrokontrolery – Jak zacząć?. Umieszczenie mojego artykułu na tej stronie to dla mnie duży zaszczyt. Programowa zmiana F_CPU
Konstruuję aktualnie licznik Geigera. Udało mi się nabyć na aukcji tubę STS-5 (CTC-5) która służy za detektor promieniowania (głównie beta). Tuba tak wymaga zasilania stałym napięciem ok. 400V, jednak pobiera bardzo mało prądu, i to tylko podczas detekcji. Złożyłem więc prototyp, który o wykryciu cząstki informuje charakterystycznym trzaskiem i mignięciem diodą LED.
W docelowej konstrukcji znajdzie się któraś Atmega (8 lub 88), wyświetlacz LCD 16×2 i wykonana płytka drukowana. Jako obudowę planuję użyć CP-Z-97/B.
Dodam jeszcze, że w projekcie przetwornicy bardzo pomógł mi użytkownik portalu Elektroda.pl psooya.
Same procesorki PIC nie są najgorsze, mimo że nie wyróżniają się jakoś specjalnie od AVR. Dużo więcej problemów sprawia natomiast środowisko programistyczne. Zainstalowałem MPLAB X IDE v.1.85 wraz z kompilatorem C XC8 (v 1.20).
Ogólnie w porównaniu do AVR jest dużo gorzej. Kompilator w wersji darmowej nie pozwala wybrać optymalizacji, co oznacza że:
1) Nasz kod wynikowy będzie prawdopodobnie dużo za duży;
2) Nie wiemy, czy poprawnie zachowywać się będą funkcje typu „delay()”;
Kolejny problem: brak jednoznaczności. Wiele przykładowych kodów znalezionych w internecie nie zadziała. Brak „typowych” bibliotek jak inttypes.h, lub delay.h. Brzmi to może śmiesznie, ale uruchamiając pierwszy program typu „Hello World” migający diodą, brakuje takich funkcji.
Napotkałem dziwne problemy z ustawianiem bitów. Wydają się nie działać kody tego typu:
T2CON |= (1<<TMR2ON)|(1<<T2CKPS1);
, natomiast kod taki:
T2CON = 0x06;
już tak. O co chodzi?
Nie spodziewałem się, że będzie można wykonywać operacje na pojedynczych bitach. Tymczasem taki zapis jest poprawny:
TMR2ON =1;
Zauważyłem, że niektóre rejestry (dokładnie np. STRA) nie zerują się po resecie.
Nie mogę się też połapać, jak ustawiać w programie bity konfiguracyjne procesora. Można znaleźć trzy składnie.
Pierwsza:
#FUSES NOWDT
Druga:
#pragma config WDTEN = OFF
I trzecia:
__config _WDT_OFF
Której używać?
Jeśli macie sugestie, jak rozwiązać moje problemy, proszę piszcie w komentarzach.
Dzisiaj po raz pierwszy zaprogramowałem procesor z rodziny PIC!
Użyty układ to PIC16F690.
Programator brenner8 mini zakupiłem na aukcji internetowej za śmieszne pieniądze. Mikroprocesor otrzymałem w postaci próbki od firmy Microchip. Parę słów o nim:
4KB Pamięci programu
256B RAM
256B EEPROM
17 portów I/O
2 timery 8-bit
1 timer 16-bit
12 kanałowy 10-bit przetwornik AC (ADC)
Watchdog
USART
2 komparatory analogowe
Programowane źródło odniesienia! (w pewnym sensie przetwornik D/A)
Oddzielny moduł PWM, do 4 wyjść
Interfejs I2C (TWI w AVR)
Programowanie w układzie (ICSP) (ISP w AVR)
Interfejs SPI
Wewnętrzny oscylator
Brown-out Reset (BOR) – odpowiednik BOD w AVR)
Zasilanie 2.0-5.5V
Jak widać, jest to w pewnym sensie odpowiednik ATMEGA48.
Układ podpięty do programatora „zaskoczył” od razu.
UPDATE: Kolega albertbzwrócił uwagę, że pamięć tego MCU odpowiada 8KB flash w AVR. Jest to więc bardziej odpowiednik ATMEGA88. Proszę pamiętać, że nie da się dokładnie porównać obu rodzin.